In Linux networking and hardware management, the MDIO (Management Data Input/Output) bus is a communication interface used to manage and control Ethernet PHY (Physical Layer) devices. The MDIO bus allows the host system (such as a network interface controller or a switch controller) to interact with PHY devices for tasks like configuration, monitoring, and diagnostics. MDIO also know as Serial Management Interface. The MDIO serial bus is a subset of the MII(Media-independent interface) that is used to transfer management information between MAC and PHY.
Key Components and Functionality:
- PHY Devices:
- Ethernet PHY devices are responsible for transmitting and receiving Ethernet frames over the physical medium (such as twisted pair cables or fiber optics).
- Each PHY device has its own unique address on the MDIO bus, allowing the host to communicate with and control multiple PHYs connected to the same MDIO bus.
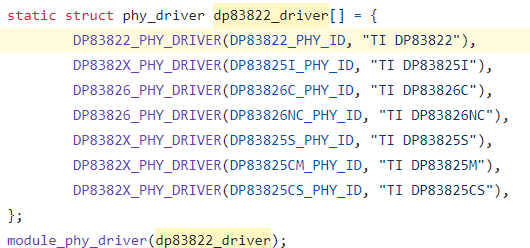
- i.e. for this DP83822 phy device defined in linux/drivers/net/phy/dp83822.c
- MDIO Bus Interface:
- In Linux, the MDIO bus interface is typically implemented using drivers and kernel modules that manage communication between the host system and PHY devices.
- It provides functions to read and write PHY registers, which contain configuration settings and status information.
- MDIO Frame Format — Clause 22 ( Basic Communication Frame Format)
- Clause 22 defines the MDIO communication basic frame format and it has following fields

- Description of each fields are :
- ST 2 bits Start of Frame (01 for Clause 22)
- OP 2 bits OP Code
- PHYADR 5 bits PHY Address
- REGADR 5 bits Register Address
- TA 2 bits Turnaround time to change bus ownership from STA to MMD if required
- DATA 16 bits Data
- Driven by STA during write
- Driven by MMD during read
- Clause 45 – (Extended MDIO Frame Format)
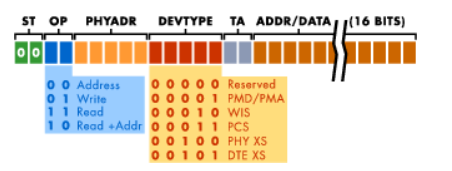
- below are the fields details of a particular frame
- ST 2 bits Start of Frame (00 for Clause 45)
- OP 2 bits OP Code
- PHYADR 5 bits PHY Address
- DEVTYPE 5 bits Device Type
- TA 2 bits Turnaround time to change bus ownership from STA to MMD if required
- ADDR/DATA 16 bits Address or Data
- Driven by STA for address
- Driven by STA during write
- Driven by MMD during read
- Driven by MMD during read-increment-address
- Usage Scenarios:
- Auto-Negotiation: The MDIO bus is used during the auto-negotiation process between network devices to determine the highest possible speed and duplex mode supported by both ends of the link.
- Link Monitoring: Allows the host to monitor link status, detect cable faults, and adjust settings dynamically.
- PHY Configuration: Enables setting PHY-specific parameters such as speed, duplex mode, flow control settings, etc.
- Linux Kernel Support:
- The Linux kernel provides MDIO bus drivers and a framework for managing PHY devices. These drivers are typically part of the networking subsystem and are responsible for initializing MDIO controllers and handling communication with PHYs.
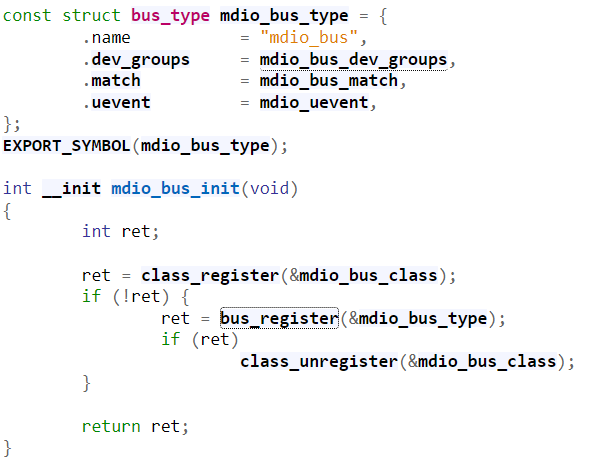
- MDIO bus initialized code present at below path drivers/net/phy/mdio_bus.c
- Users can interact with the MDIO bus and PHY devices through utilities like
ethtooland system libraries that expose MDIO bus operations.
- The Linux kernel provides MDIO bus drivers and a framework for managing PHY devices. These drivers are typically part of the networking subsystem and are responsible for initializing MDIO controllers and handling communication with PHYs.
i.e. For Example
In practical uses, if you have a network interface card (NIC) with multiple Ethernet ports, each port might have its own PHY device connected via the MDIO bus. The Linux kernel’s MDIO bus drivers would facilitate communication between the NIC and these PHYs, allowing the kernel to configure network settings and monitor link status as needed.
For more details about the Frame Format Please refer to following links