FreeRTOS is one of the most widely adopted real-time operating systems in the embedded world — and for good reason. It’s tiny, fast, and built to run on microcontrollers with limited resources. But what makes it tick under the hood? Let’s dive into the architecture of FreeRTOS and explore how it delivers real-time performance with simplicity and efficiency.
Core Design Philosophy
At its heart, FreeRTOS is designed for simplicity, portability, and deterministic behavior. The architecture is modular, written in C, and built to be hardware-agnostic — with just a small layer of hardware-specific code (called the porting layer).
Key Components of FreeRTOS Architecture
1. Tasks (or Threads)
- Tasks are the basic units of execution.
- Each task has its own stack, priority, and state (Running, Ready, Blocked, Suspended).
- Tasks can be created, deleted, suspended, or resumed dynamically.
2. Scheduler
- The preemptive or cooperative scheduler is the brain of FreeRTOS.
- It decides which task runs next, based on priority and state.
- In preemptive mode, higher-priority tasks can interrupt lower-priority ones.
- In tickless mode, the scheduler conserves power by turning off the system tick timer when idle.
3. Kernel Tick (SysTick)
- A periodic interrupt (usually every 1ms) drives the scheduler.
- It updates task delays and triggers context switches.
4. Queues
- FreeRTOS provides message queues for safe inter-task communication.
- They help tasks exchange data without conflicts.
5. Semaphores & Mutexes
- Used for synchronization and resource sharing.
- Binary semaphores for signaling.
- Counting semaphores for tracking events.
- Mutexes with priority inheritance to prevent priority inversion.
6. Timers
- Software timers allow you to run functions after a timeout or periodically, without creating a task for each.
7. Memory Management
- Multiple allocation schemes are available:
heap_1(very basic, no freeing)heap_2(alloc/free without defragmentation)heap_4(best balance – alloc/free + coalescing)heap_5(supports multiple memory regions)
8. Porting Layer
- A thin hardware-specific layer that connects FreeRTOS to the underlying processor.
- Handles context switching, SysTick configuration, and interrupt priorities.
FreeRTOS Architecture Diagram
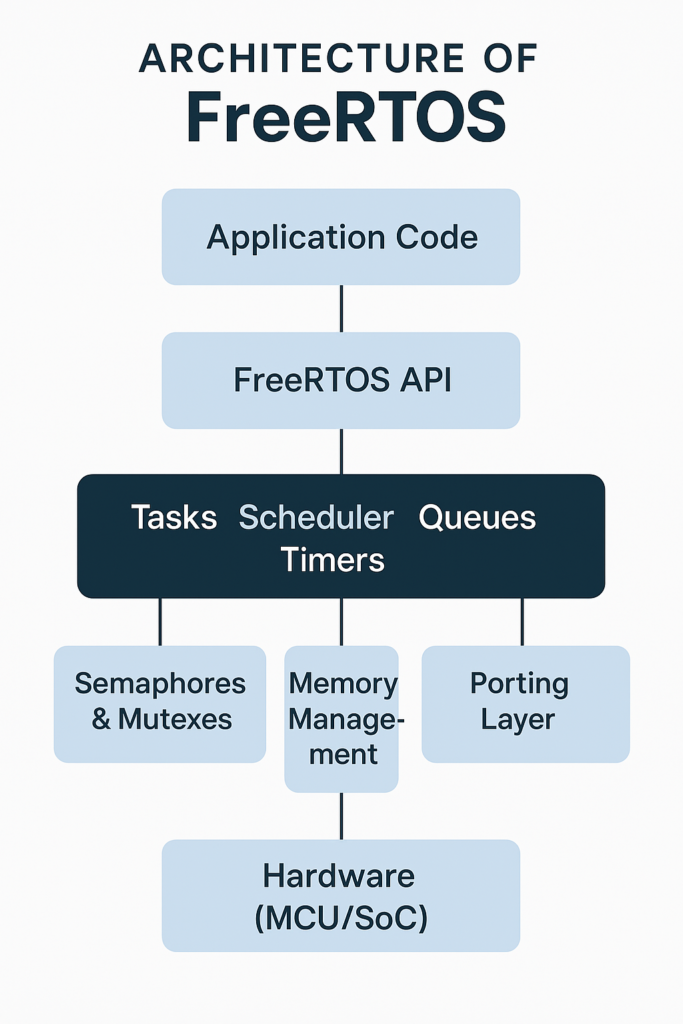
Flashed across all MCU
Lightweight: Minimal memory footprint.
Deterministic: Real-time deadlines are met.
Modular: Use only what you need.
Portable: Runs on over 40+ microcontroller architectures.
Reliable: Used in commercial-grade systems from automotive to IoT.
read more about MCU and MPU
Closing Remarks
FreeRTOS’s architecture used in ESP 32 chip https://www.espressif.com/ might seem minimal at first glance — but that’s its superpower. It delivers real-time performance, code portability, and flexibility without the complexity of traditional operating systems. Whether you’re building a smart sensor, a medical device, or an industrial controller, FreeRTOS provides a rock-solid foundation to bring your embedded ideas to life.
1 thought on “Architecture of FreeRTOS: Inside the Engine of Embedded Systems”